
随着人工智能的快速发展,人机交互(HRI)技术受到了广泛关注,特别是在人形机器人方面。其中机器反馈对于增强用户体验至关重要,机器人的响应速度必须保持在一致的范围内;过快的反应会引起不适,而过迟的反应可能会出现脱离。因此,机器人响应速度的可调性已成为优先事项。然而,目前的方法仍然受到复杂软件的限制,仅限于单向速度提升。
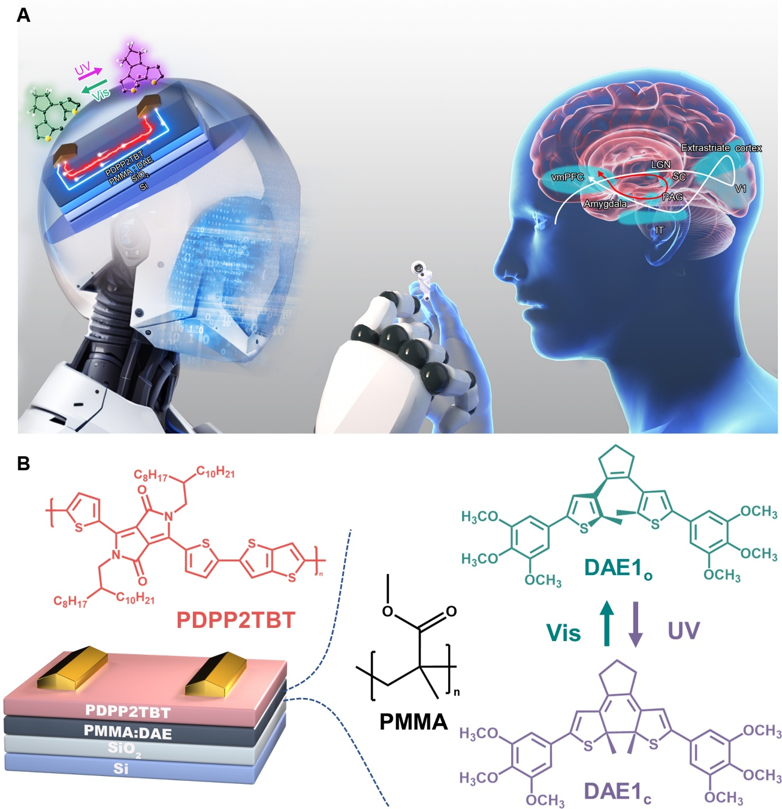
图一:人脑中的两条通路及器件的结构设计
受人脑响应机制的启发,我们开发了一种有机浮栅场效应晶体管(OFGFET)来双向控制响应速度。在通过将光异构化合物掺杂到聚甲基丙烯酸甲酯(PMMA)中构建浮栅后,我们可以通过改变浮栅在不同光(UV或可见光)照射下的捕获能力来调节背电荷转移速率。
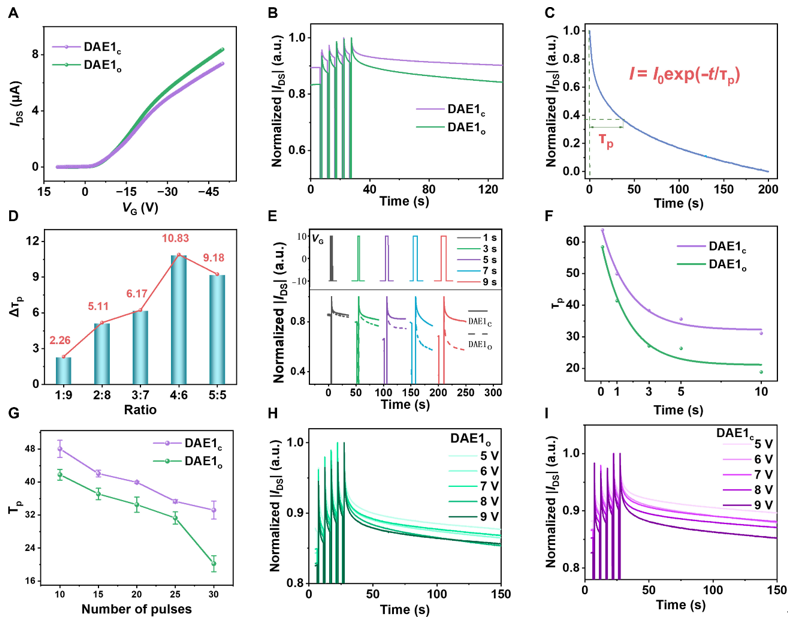
图二:器件的光控响应特性
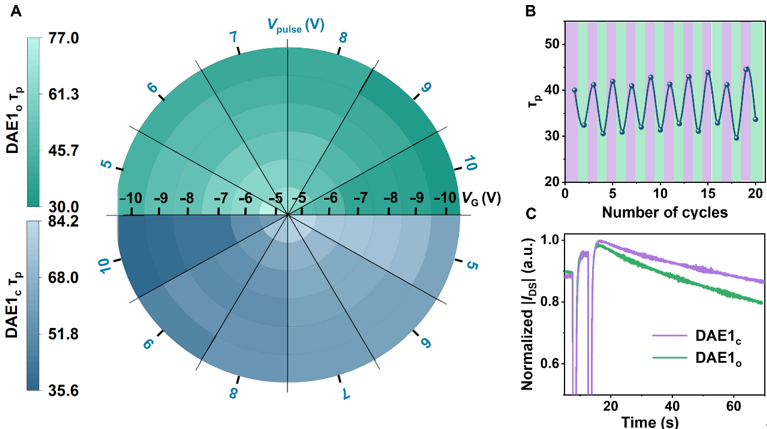
图三:器件的电学性能
由于二芳基乙烯的光致异构特性,在紫外光照和可见光照后器件表现出不同的响应速度。为了定量的描述衰减速率,我们定义了参数τp,τp值越小,响应速度越大。改变不同的脉冲条件,可见光照后光电流的衰减速度都快于紫外光照后。
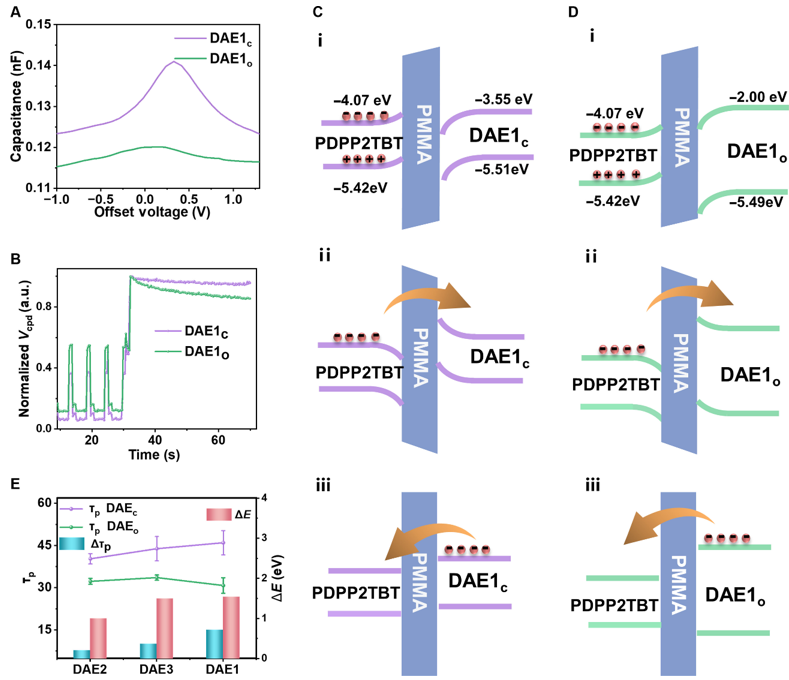
图四:光调控机理
机理研究表明,紫外光通过降低光异构化合物的最低未占分子轨道(LUMO)能级来降低反向电荷转移速率,延长响应时间,而可见光通过增加LUMO能级来提高反向电荷转移速度,缩短响应时间。因此器件有可能实现HRI中机器人响应速度的自适应控制。同时,通过分子工程可以很容易地调整双向可调性,从而促进对机器人响应和视频播放速度的双重控制。
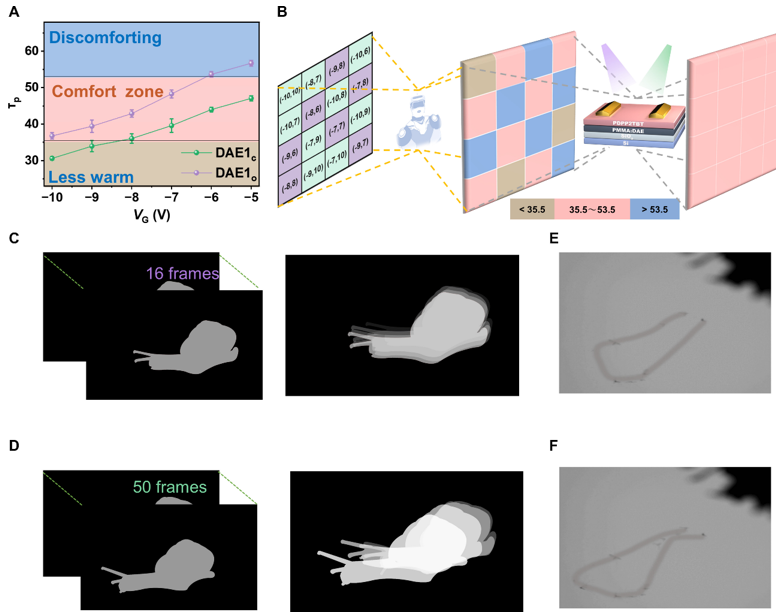
图五:在人机交互中的应用
在紫外线或可见光照射下,OFGFET的响应速率可以双向调节,以实现HRI的舒适区。如图5可用于视频播放速度的调控,对于运动速度较慢的物体可以调快播放速度,节约时间,而对于运动速度过快的物体,可以调慢播放速度以获得清晰的运动轨迹。
这项工作提出了一种实现响应速度双向控制的创新策略,为在各种HRI场景中实现智能机器人的高适应性和功能性提供了有效途径。
原文链接:Bioinspired adaptive response speed for high-quality human-robot interactions | Science Advances